Full-stack robotics
This year we will be designing robots from the ground up, using CAD (cad-with-onshape) to design 3d-printed mechanical components, arduino or ESP32 programming for behavior, and various sensor modules for sensing.
Scheduled classes
- (Not Scheduled): building-a-photogate
- 2025-01-07: photo-gate-design
- 2025-01-14: engineering-process
- 2025-01-16: prototype-testing
- 2025-01-21: photogate-and-robot
- 2025-01-21: testing-photogate-prototype
- 2025-01-23: engr-project-time-1-23
- 2025-01-30: photogate-review-and-robot-programming
- 2025-02-04: robots-making-them-move
- 2025-02-11: photogate-review-bot-race
- 2025-02-25: robots-turning-on-the-sensors
- 2025-02-27: sensor-driven-navigation
- 2025-03-04: line-following
- 2025-03-06: design-elegance
- 2025-03-17: implementing-state-machines-cpp
- 2025-03-18: tb6612fng-motor-driver-setup
- 2025-03-20: bot-build-and-load
- 2025-04-01: printing-remaining-parts
- 2025-04-08: bot-final-debug
- 2025-04-15: following-a-line
- 2025-05-12: engineering-technical-reports
- 2025-05-13: summer-project-freemocap
- 2025-05-20: updated-report-outlines
Projects
Basic Differential Chassis (Complete)
Design a basic differential-steering robot chassis. It must have mounting points for motors, battery pack, and control circuitry including an Arduino UNO or Nano.
Line follower (In-progress)
Progress tracked on the Project Kanban
Goals:
- Use optical sensors to detect the position of a line
- Generate corrective steering signals
- drive robot to follow path
- If path is composed of line segments and tangent circular arcs
- If path is 90-degree corners connected with straight segments
- If path is unconstrained, including turns sharper than 90 degrees
- Fastest bot wins
Teaching:
- Working with optical sensors
- Hardware interface Hi/Lo pin, potentiometer for tuning
- Arduino code
- Turn radius of the line, thickness of the line, and designing the array of light sensors
- Movement with differential steering
Robot vacuum demo (Future)
Goals:
- Use bot sensors and estimation to build a map of a place
- Explore the space in a controlled way
- Score for contest: coverage percent divided by time
- (potential) make a bot that can be powered by a drill battery (3d print the connection).
Robotic arm (Future)
We will build a robotic arm, using something like one of the following as a project guide:
- BCN3D Moveo github page
- modular arm with go-pro standardized connections
- HtM SCARA arm
- HtM Arduino Arm with smartphone control
- OS-Arm
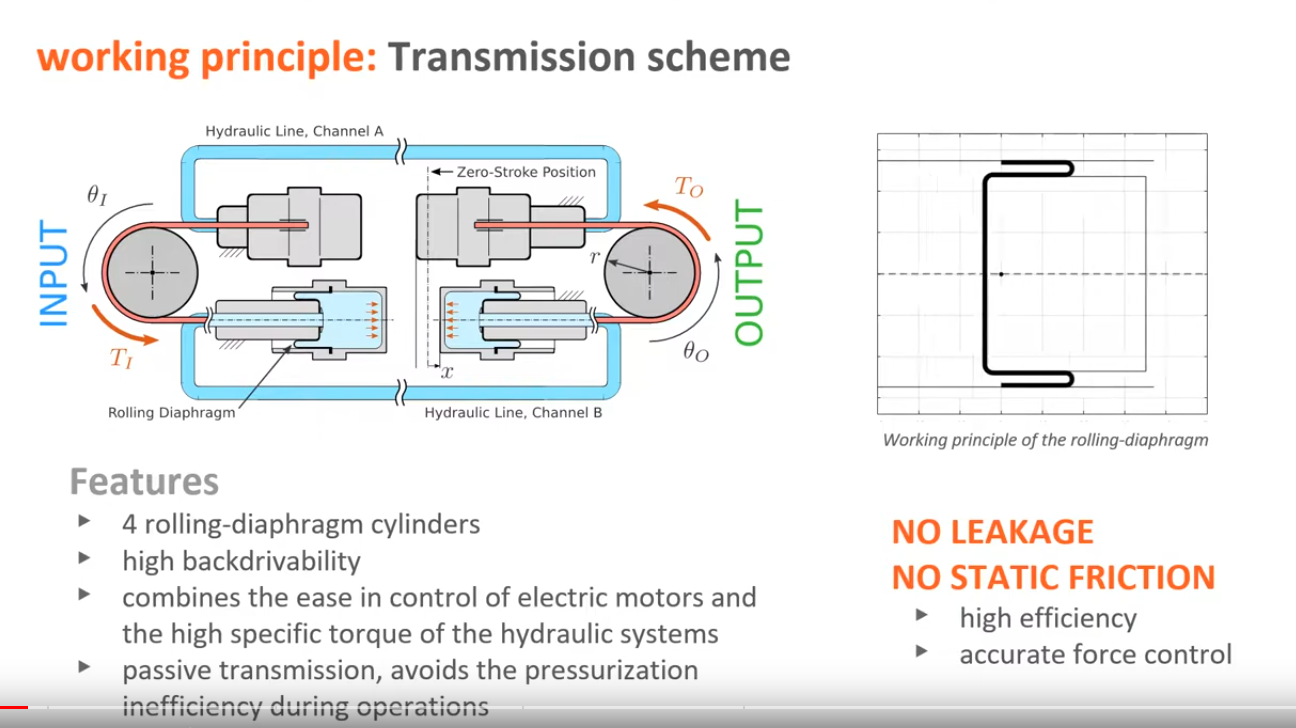
- The disney rolling-diaphragm-piston-robot might be a fun thing to try also.
- Bowden-tube cable guide motion system
- Annin Robotics AR4 Mk3 is a 0.2mm repeatability 6-axis open source industrial arm. Has kits that would put it at about $2k to build
- Arctos arm is an open 3D-printable arm, not accurate enough for real cnc work but pretty cool
Build a Rolling diaphragm actuator